ROS準拠FPGAコンポーネント技術 |
|
| ロボットへのFPGA導入を 容易にする設計技術! |
|
| 提案する工法・構造・製品など | |
|
|
| 特徴と強み |
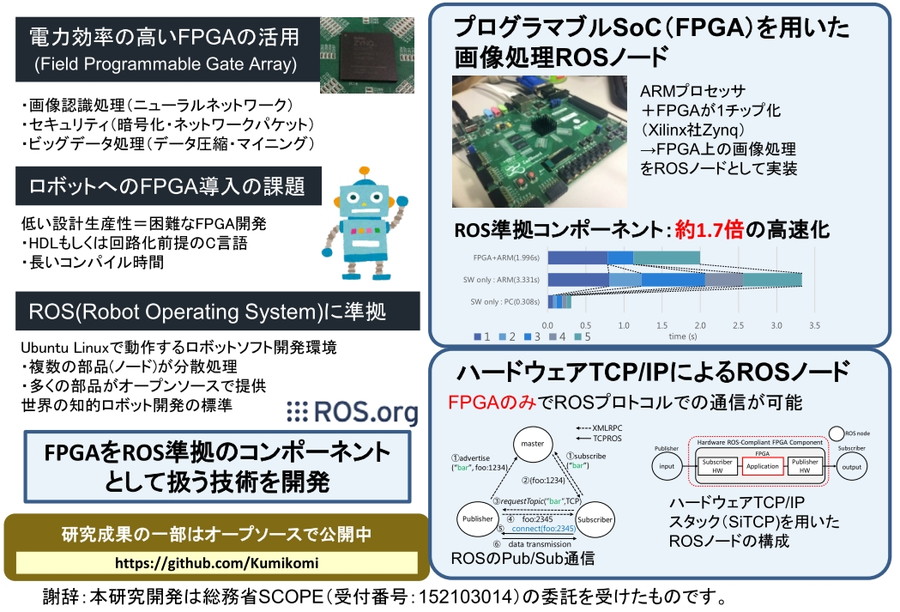
| ● ロボット構築のためのフレームワークとして注目されているROS(Robot Operating System)において、FPGA処理を簡単に統合することを目的とした「ROS準拠FPGAコンポーネント」を開発しました。 画像からの特徴点抽出・特徴量計算や、ニューラルネットワーク(神経回路網)による画像認識処理などの処理を、FPGAを用いて高速化・低消費電力化し、ロボットシステムの高性能化・高機能化・低消費電力化に貢献します。 |
| キーワード |
| ● FPGA、ロボット、コンポーネント技術、コンピュータビジョン、 ● ハードウェア・ソフトウェア協調システム設計 |
| ライフワーク |
| ● FPGAを搭載したロボットを開発します。例として、生活支援ロボットや災害救助ロボットにとって重要なVisual SLAM(画像による自己位置推定マッピング)を題材として、クラウドとの連携による低消費電力化を行います。そして、次世代の知的なロボットシステムの実現に貢献します。 |
国立大学法人 宇都宮大学大学院 工学研究科 情報システム科学専攻

大川 猛 助教
http://www.is.utsunomiya-u.ac.jp/pearlab/
所在地:栃木県宇都宮市陽東7-1-2
●プロフィール:
2003 東北大学大学院工学研究科電子工学専攻修了
2004-2009 産業技術総合研究所 研究員
2009-2011 株式会社トプスシステムズ
2011- 宇都宮大学大学院工学研究科 助教
●専門分野:
FPGA、組込みシステム開発、設計手法
●研究経歴:
シリコンLSI製造技術、LSI論理設計、ハードウェア・ ソフトウェア協調システム設計、FPGA、仮想ハード ウェア、分散オブジェクト、ミドルウェア、ヘテロジニア ス・マルチコアプロセッサ、ロボット向けソフトウェアシ ステム、コンピュータビジョン
提案の狙い:
□コスト低減 ■小型・軽量化 □短納期化 ■品質・性能向上 ■安全・環境対策 □その他
□コスト低減 ■小型・軽量化 □短納期化 ■品質・性能向上 ■安全・環境対策 □その他
掲載企業との商談・工場見学をご希望の場合は、下記までご連絡ください。
[お問合せ]常陽銀行 コンサルティング営業部
メールアドレス:monozukuri@joyobank.co.jp